貫和敏博*
*東北大学名誉教授
[Essays] A tale of two domains: "breathing movement" and "gas-exchange/lung science"
- A personal history and the significance of breathing in the respiratory medicine
No 9-2: Everything starts from a bombardment sense in the deep body: the Nishino Breathing Method (2)Basics
–Karin (breathing with body axis rotation); Locomotion under central pattern generator (CPG) for Soma awake
Toshihiro Nukiwa*
*Professor Emeritus, Tohoku University
呼吸臨床 2019年3巻4号 論文No.e00081
Jpn Open J Respir Med 2019 Vo3. No.4 Article No.e00081
DOI: 10.24557/kokyurinsho.3.e00081
掲載日:2019年4月30日
©️Toshihiro Nukiwa. 本論文の複製権,翻訳権,上映権,譲渡権,貸与権,公衆送信権(送信可能化権を含む)は弊社に帰属し,それらの利用ならびに許諾等の管理は弊社が行います。
西野流呼吸法の基礎稽古の後半の流れるような動作はどんな身体を覚醒するのだろうか?
現代医学では身体を動かすとは筋力(筋肉細胞のmyosinとactinの間のスライディングによる収縮)が主であると考えられている。学問研究の進展からすると無理もない考え方である。しかし身体のしなやかな動きには+αが必要である。
現在,ロボット工学の進歩が目覚ましい。あちこちでモーターを駆動力として動くロボットをみると,その動作は,しかしどれもみなギコチない,スムーズではない。なぜそうなのか? 地球上の脊椎動物が皆スムーズな動きが可能で,ロボットがそれを模倣できないのは,医学・ロボット工学は何かを誤解しているからではないか?
この滑らかさに主として関与するのが,第4回で議論した「Fascia構造」ではないのか?
残念ながらこの領域の研究はまだ入り口にも達していない(Fascia組織は医学生が解剖学を学ぶ時,学習目的の臓器や神経にたどり着くため,捨てていた部分である)。
第4回のFasciaの説明において,歴史的にはbody workというマッサージ(現代医学のように1つの臓器を対象とするのではなく,ヒトの全身体をintervention対象とする)を考える上で出てきた新しい概念であると説明した。
その中心的な研究者であるMyers Tは,Anatomy Trainsという,皮下にあって動物(人間)の動きのための連続体構造(腱・筋膜連続体)を提唱している(図2a)[5]。この下着のような連続構造(実際に英語では,Fascia系は人の身体のunderwareだと呼ばれる)は,筋肉が梃子として使う関節構造を,腱組織で覆って乗り越え全身を連続している(図2b)。ロボットにはそれがない。
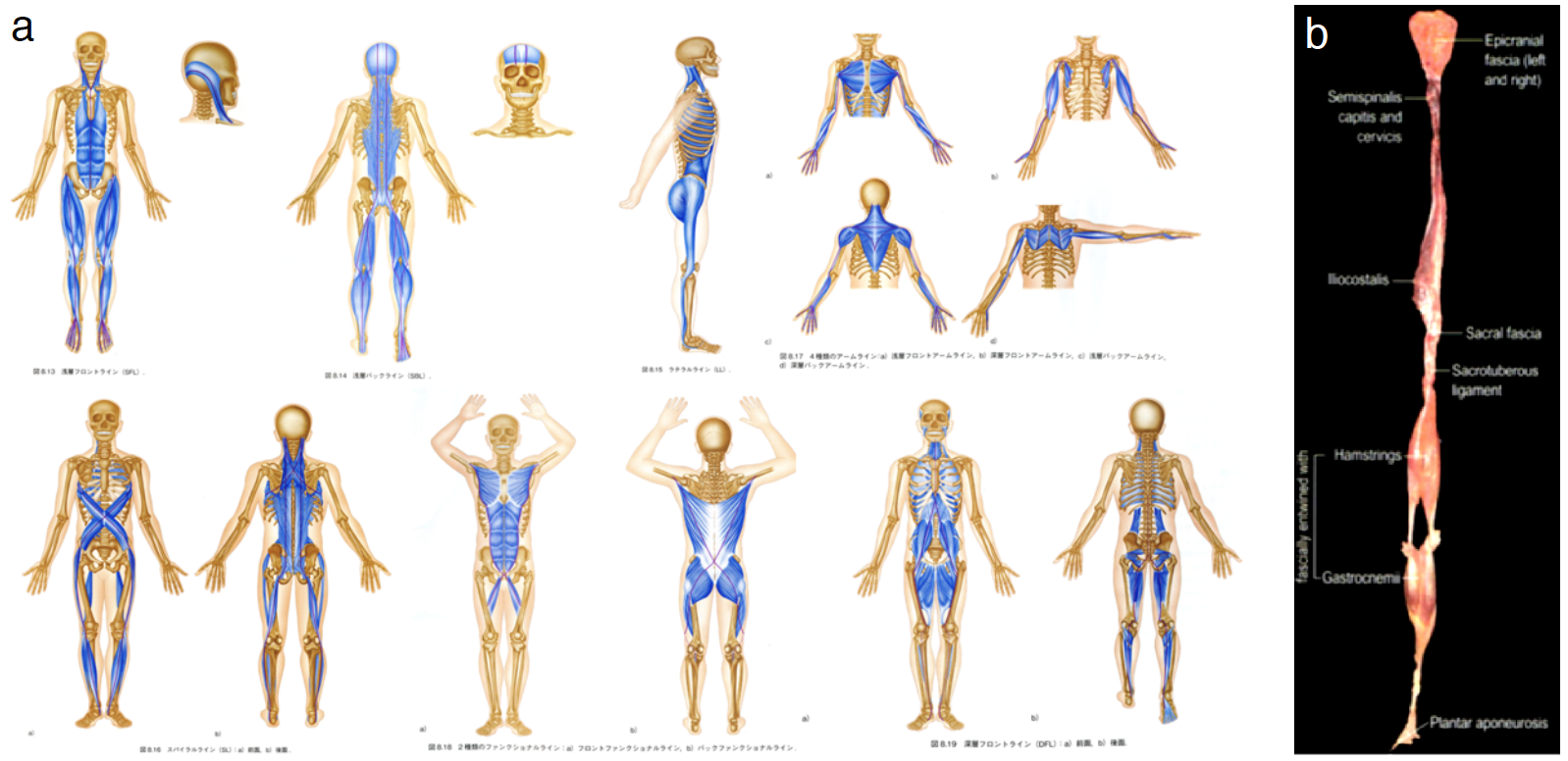
図2 Anatomy trainsの一部を示す全身図と剖検像
a. Myers TWが2001年に提唱したAnatomy trainsである。その教科書のサブタイトルには,”Myofascial meridians for manual and movement therapists”とあり,経絡の影響が背景にある。腱・筋膜のイメージで,underwareに弾性あるゴムの入った帯が全身に縦横各路線系となっているとも理解できる。
b. 同書[5]にAnatomy trainの実物として,剖検体におけるFascia可視化が,下肢から背面までの連続体の腱・筋膜系として示してある。しかし,腱・筋膜の機能に関する実測は,本来生きた身体で研究すべきものである。その伝達のsensingに使用する機器や,必要な全身装置等は,現在の技術でも実証できそうである。しかし運動学を始め,そうした研究展開は充分とはいえない(第5回図5参照。しかし方法論の開発は近未来に可能と考える)。
(文献[5]より引用)
滑らかさ,しなやかさという脊椎動物の運動の原点にはこのAnatomy Trainsが示すFascia構造による全身の連携にあると仮説するのは,今後21世紀医学でこれらのギャップが埋められると予想するからである。
さて第9回で紹介している西野流呼吸法基礎稽古の「華輪」およびそれに続く,流れるような「捻り」を含む呼吸法動作に関与しているのは,筋肉でなくこのFascia構造によるAnatomy Trains(図2a)だと考えると,身体を連携している実態と呼吸運動がよく理解できる。筆者自身,この部分には比較的早い段階で気付いていたが,「足芯呼吸」や「対気」とどう関連するかという全体像が不十分で逡巡していた部分である。
「華輪」の動作は一見「両腕の脱力」ともみられる。ビデオでみる由美さんの華輪動作の華麗な動きは筋肉主体の運動とは違うものである。一般に「脱力」は,意図的に「筋肉を緩める」と理解されるが,はたしてそれでスムーズな動きや捻りの呼吸法を説明できるだろうか? 初心者の華輪動作で身についていないものは何か?
むしろ腱・筋膜Fasciaとしての連続体であるAnatomy Trainsを,「華輪」の交互rotationのイメージ上に想像すると,弾力ある膠原組織がしなやかさが主体の動きと理解される。華輪の動作がわれわれの身体(Soma)に働きかけて,長い進化の結果獲得されたFasciaで連続した元型身体を覚醒させるのでないか。それが不思議な「華輪」稽古の本質であると理解される。
追記すれば,次回説明する「対気」では二人の間で手の甲を接する。そして双方のイメージのやり取りをする。この時,上級者の手は,信じがたいほど「重い」。力を入れていないのが嘘のようだ。
それはなぜか? 答えは腕だけではなく,Fasciaとして全身に繋がっているからだと考えている。全身のFasciaの重さを手の甲で感じるとでもいうべきか? しかしそうした方向の医学研究はまだない。
この意味では,しなやかな身体の動きとしては,Fasciaが「主」で筋肉は「従」であるといえる。むしろロボット工学としては,このFascia連続体をどう工学として模倣するかという点に,今後の人型ロボットの展開があるのかもしれない。